Arbeta med omvänd kinematik (IK – inverse kinematics)
Flash Player 10 och senare, Adobe AIR 1.5 och senare, kräver Flash CS4 eller senare
|

Omvänd kinematik (IK) är en bra teknik när du skapar naturtrogen rörelse.
Med omvänd kinematik kan du skapa koordinerade rörelser i en kedja med sammankopplade delar som kallas för IK-armatur, så att delarna flyttas tillsammans på ett realistiskt sätt. Delarna i armaturen består av ben och leder. Utifrån slutpunkten i armaturen beräknas vinklarna för lederna som behövs för att nå fram till slutpunkten.
Att beräkna dessa vinklar manuellt kan vara mycket krävande. Fördelen med den här funktionen är att du kan skapa armaturer interaktivt med Adobe® Flash® Professional. Animera dem sedan med ActionScript. IK-motorn som ingår i Flash Professional utför beräkningar som beskriver armaturens rörelse. Du kan begränsa rörelserna till vissa parametrar i ActionScript-koden.
En nyhet i Flash Professional CS5-versionen av IK är begreppet benfjädring, som oftast associeras med förstklassiga animeringsprogram. Tillsammans med den nya, dynamiska fysikmotorn kan du använda den här funktionen för att konfigurera verklighetstrogna rörelser. Effekterna visas både under körning och redigering.
För att kunna skapa IK-armaturer måste du ha en licens för Flash Professional.
Grunderna i omvänd kinematik
Med omvänd kinematik (IK) kan du skapa realistisk animering genom att koppla ihop delarna så att de flyttas i förhållande till varandra på ett verklighetstroget sätt.
Med omvänd kinematik kan du till exempel flytta ett ben till en viss position genom att röra de leder i benet som behövs för att uppnå önskad ställning. Omvänd kinematik använder ett ramverk med ben sammankopplade i en struktur som kallas för en IK-armatur. Med paketet
fl.ik
kan du skapa animeringar som påminner om naturlig rörelse. Med det kan du animera flera IK-armaturer sömlöst utan att behöva kunna något om fysiken bakom IK-algoritmerna.
Skapa IK-armaturen med stödjande ben och leder med Flash Professional. Sedan kan du använda IK-klasser för att animera dem vid körning.
Mer information om hur du skapar en IK-armatur finns i avsnittet Använda omvänd kinematik i
Använda Flash Professional
.
Viktiga termer och begrepp
Följande referenslista innehåller viktiga termer om den här funktionen:
-
Armatur
-
En kinematisk kedja som består av ben och leder, som används vid datoranimering för att simulera realistisk rörelse.
-
Ben
-
Ett stelt segment i en armatur, som motsvarar ett ben i ett djurskelett.
-
Omvänd kinematik (IK)
-
Process för att fastställa parametrarna för sammankopplade flexibla objekt som kallas för kinematisk kedja eller armatur.
-
Led
-
Den plats där två ben sammankopplas för att möjliggöra benens rörelser, som motsvarar leden hos ett djur.
-
Fysikmotorn
-
Ett paket med fysikrelaterade algoritmer som används för verklighetstrogna rörelser i animeringar.
-
Fjädring
-
Kvaliteten på ett ben som rör sig och reagerar när det överordnade benet rör sig och som sedan försvinner sedan successivt.
Översikt över animering av IK-armaturer (Inverse Kinematic)
När du har skapat en IK-armatur i Flash Professional använder du
fl.ik
-klasserna för att begränsa dess rörelser, spåra dess händelser och animera den vid körning.
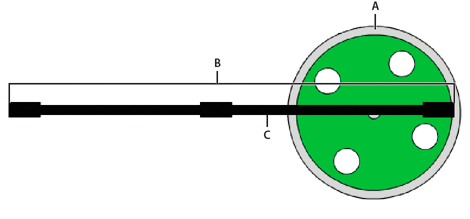
I bilden nedan visas ett filmklipp med namnet
Wheel.
Axeln är en instans av en IKArmature med namnet
Axle
. Klassen IKMover flyttar armaturen samtidigt som hjulet roterar. Ett IKBone,
ikBone2
, i armaturen kopplas till hjulet vid leden vid änden.
-
A.
-
Hjul
-
B.
-
Axel
-
C.
-
ikBone2
Vid körning snurrar hjulet tillsammans med rörelseinterpoleringen
__motion_Wheel
, som behandlas i
Beskriva animeringen
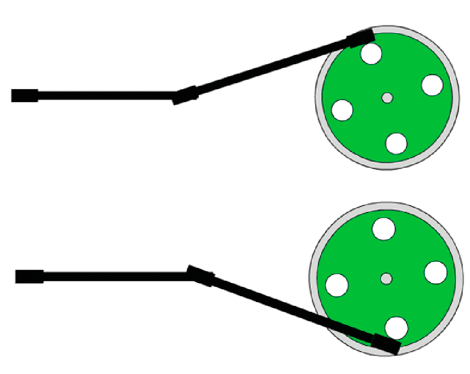
. Ett IKMover-objekt initieras och kontrollerar axelns rörelser. I bilden nedan visas två ögonblicksbilder av axelarmaturen som kopplas till spinnrocken vid olika bildrutor i rotationen.
ActionScript gör följande under körning:
-
Hämtar information om armaturen och dess komponenter
-
Instansierar ett IKMover-objekt
-
Flyttar axeln i kombination med hjulets rotation
import fl.ik.*
var tree:IKArmature = IKManager.getArmatureByName("Axle");
var bone:IKBone = tree.getBoneByName("ikBone2");
var endEffector:IKJoint = bone.tailJoint;
var pos:Point = endEffector.position;
var ik:IKMover = new IKMover(endEffector, pos);
ik.limitByDistance = true;
ik.distanceLimit = 0.1;
ik.limitByIteration = true;
ik.iterationLimit = 10;
Wheel.addEventListener(Event.ENTER_FRAME, frameFunc);
function frameFunc(event:Event)
{
if (Wheel != null)
{
var mat:Matrix = Wheel.transform.matrix;
var pt = new Point(90, 0);
pt = mat.transformPoint(pt);
ik.moveTo(pt);
}
}
Följande IK-klasser används för att flytta axeln:
-
IKArmature: beskriver armaturen, en trädstruktur som består av ben och leder och som måste skapas med Flash Professional
-
IKManager: behållarklass för alla IK-armaturer i dokumentet, som måste skapas i Flash Professional
-
IKBone: ett segment i en IK-armatur
-
IKJoint: en koppling mellan två IK-ben
-
IKMover: initierar och kontrollerar armaturernas IK-rörelser
Fullständiga och detaljerade beskrivningar av de här klasserna finns i
ik-paketet
.
Hämta information om en IK-armatur (Inverse Kinematic)
Deklarera först variabler för armaturen, benet och leden som utgör de delar som du vill flytta.
Följande kod använder metoden
getArmatureByName()
för klassen IKManager för att tilldela värdet på axelarmaturen till IKArmature-variabeln
tree
. Axelarmaturen har redan skapats med Flash Professional.
var tree:IKArmature = IKManager.getArmatureByName("Axle");
Följande kod använder på ett liknande sätt metoden
getBoneByName()
för klassen IKArmature för att tilldela värdet på benet
ikBone2
till IKBone-variabeln.
var bone:IKBone = tree.getBoneByName("ikBone2");
Ändleden för benet
ikBone2
är den del av armaturen som kopplas till spinnrocken.
Följande rad deklarerar variabeln
endEffector
och tilldelar den till egenskapen
tailjoint
för benet
ikBone2
:
var endEffector:IKJoint = home.tailjoint;
Variabeln
pos
är en punkt som lagrar den aktuella positionen för leden
endEffector
.
var pos:Point = endEffector.position;
I det här exemplet är
pos
positionen för leden i slutet på axeln där den ansluter till hjulet. Det ursprungliga värdet på den här variabeln hämtas från egenskapen
position
för IKJoint.
Instansiera en IK Mover och begränsa dess rörelse
En instans av klassen IKMover flyttar axeln.
Följande rad instansierar IKMover-objektet
ik
samt skickar elementet som ska flyttas och startpunkten för rörelsen till konstruktorn:
var ik:IKMover = new IKMover(endEffector, pos);
Med egenskaperna för klassen IKMover kan du begränsa armaturens rörelse. Du kan begränsa rörelsen utifrån rörelsens avstånd, iterationer och tid.
Följande egenskapspar framtvingar dessa gränser. Paren består av ett booleskt värde, som anger om rörelsen begränsas, och ett heltal, som anger gränsen:
|
Boolesk egenskap
|
Heltalsegenskap
|
Begränsning
|
|
limitByDistance:Boolean
|
distanceLimit:int
|
Anger det maximala avstånd i pixlar som IK-motorn ska flytta för varje iteration.
|
|
limitByIteration:Boolean
|
iterationLimit:int
|
Anger högsta antal iterationer som IK-motorn utför för varje rörelse.
|
|
limitByTime:Boolean
|
timeLimit:int
|
Anger maxtiden (i millisekunder) under vilken IK-motorn utför rörelsen.
|
Som standard anges alla booleska värden till
false
, vilket innebär att rörelsen inte är begränsad om du inte uttryckligen anger ett booleskt värde som
true
. Om du vill tvinga fram en begränsning anger du relevant egenskap som
true
och anger sedan ett värde för motsvarande heltalsegenskap. Om du anger begränsningen som ett värde utan att ange motsvarande boolesk egenskap ignoreras gränsen. I så fall fortsätter IK-motorn att flytta objektet tills en annan gräns eller målpositionen för IKMover uppnås.
I följande exempel anges maxavståndet för armaturens rörelse till 0,1 pixlar per iteration. Det maximala antalet iterationer för varje rörelse anges till tio.
ik.limitByDistance = true;
ik.distanceLimit = 0.1;
ik.limitByIteration = true;
ik.iterationLimit = 10;
Flytta en IK-armatur (Inverse Kinematic)
IKMover flyttar axeln i hjulets händelseavlyssnare. I varje enterFrame-händelse för hjulet beräknas en ny målposition för armaturen. Om du använder metoden
moveTo()
flyttar IKMover ändleden till målpositionen så långt bort det går inom de begränsningar som anges med egenskaperna
limitByDistance
,
limitByIteration
och
limitByTime
.
Wheel.addEventListener(Event.ENTER_FRAME, frameFunc);
function frameFunc(event:Event)
{
if (Wheel != null)
{
var mat:Matrix = Wheel.transform.matrix;
var pt = new Point(90,0);
pt = mat.transformPoint(pt);
ik.moveTo(pt);
}
}
Använda fjädring
Omvänd kinematik i Flash Professional CS5 har stöd för benfjädring. Benfjädring kan appliceras under redigering, och benfjädringsattribut kan läggas till eller ändras under körningstid. Fjädring är en egenskap för ett ben och dess leder. Den har två attribut:
IKJoint.springStrength
, som anger fjädringsmängden samt
IKJoint.springDamping
, som ökar styrkevärdets motstånd och ändrar fjädringens minskningstakt.
Fjädringsstyrka är ett procentvärde från standardvärde 0 (helt rigid) till 100 (mycket lös och kontrollerad av fysiken). Ben med fjädring reagerar på tillhörande leds rörelser. Om ingen annan översättning (rotation, x eller y) är aktiverad har fjädringsinställningarna ingen effekt.
Fjädringsdämpning är ett procentvärde från standardvärde 0 (inget motstånd) till 100 (kraftigt dämpad). Dämpning påverkar den tid som löper mellan ett bens initiala rörelse och dess återgång till viloläge.
Du kan se om det finns aktiverade fjädrar för ett IKArmature-objekt genom att kontrollera dess
IKArmature.springsEnabled
-egenskap. De övriga fjäderegenskaperna och metoderna hör till enskilda IKJoint-objekt. En led kan aktiveras för en vinkelrotation och översättning längs x- och y-axlarna. Du kan positionera en roterande leds fjädervinkel med
IKJoint.setSpringAngle
och en översättningsbar leds fjäderposition med
IKJoint.setSpringPt
.
I det här exemplet väljs ett ben efter namn och dess tailJoint identifieras. Koden testar den överordnade armaturen för att se om fjädrarna är aktiverade och anger därefter fjädringsegenskaperna för leden.
var arm:IKArmature = IKManager.getArmatureAt(0);
var bone:IKBone = arm.getBoneByName("c");
var joint:IKJoint = bone.tailJoint;
if (arm.springsEnabled) {
joint.springStrength = 50; //medium spring strength
joint.springDamping = 10; //light damping resistance
if (joint.hasSpringAngle) {
joint.setSpringAngle(30); //set angle for rotational spring
}
}
Använda IK-händelser
Med klassen IKEvent kan du skapa ett händelseobjekt som innehåller information om IK-händelser. IKEvent-informationen beskriver rörelsen som har avbrutits på grund av att angiven gräns för tid, avstånd eller iteration överskrids.
Följande kod visar en händelseavlyssnare och hanterare för spårning av tidsgränshändelser. Den här händelsehanteraren rapporterar tid, avstånd och antal iterationer samt ledegenskaper för en händelse som utlöses när tidsgränsen för IKMover överskrids.
var ikmover:IKMover = new IKMover(endjoint, pos);
ikMover.limitByTime = true;
ikMover.timeLimit = 1000;
ikmover.addEventListener(IKEvent.TIME_LIMIT, timeLimitFunction);
function timeLimitFunction(evt:IKEvent):void
{
trace("timeLimit hit");
trace("time is " + evt.time);
trace("distance is " + evt.distance);
trace("iterationCount is " + evt.iterationCount);
trace("IKJoint is " + evt.joint.name);
}
|
|
|
|
|